
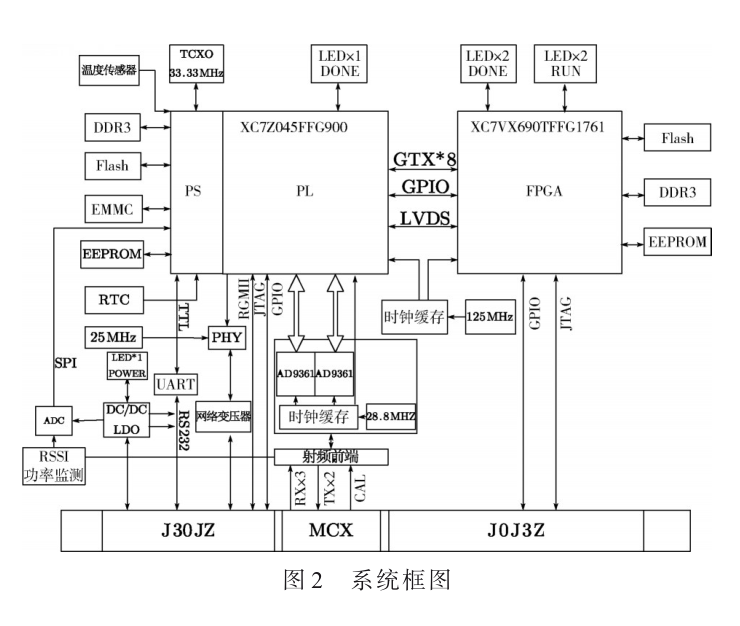
一种用于DOA估计的高精度同步多天线系统设计[通信与网络][通信网络]
發(fā)表于:2024/9/14 下午2:19:00
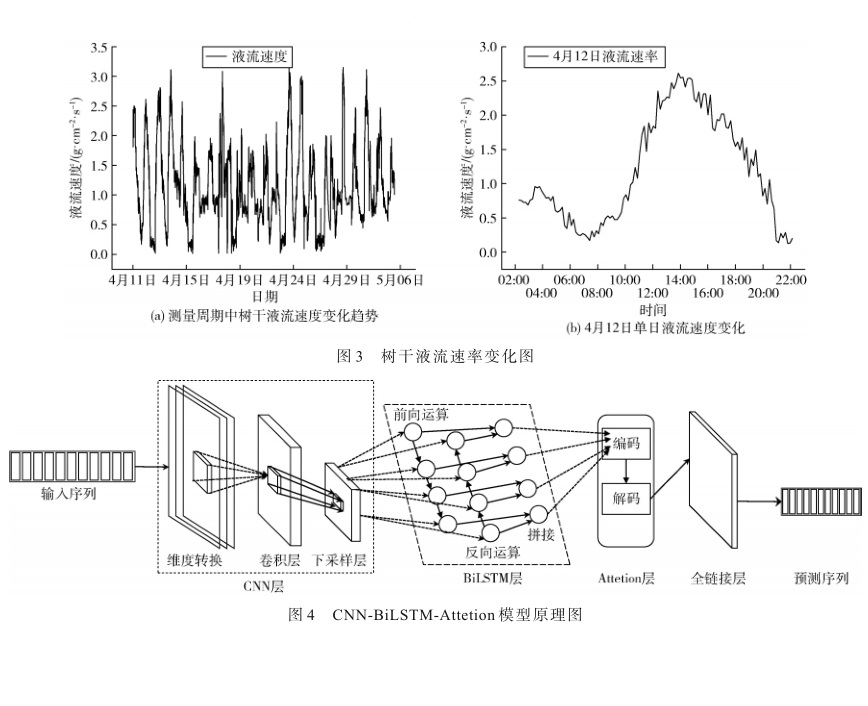
基于CNN-BiLSTM-Attetion的银杏液流预测模型及环境因子影响研究[模拟设计][其他]
發(fā)表于:2024/9/14 下午2:05:21
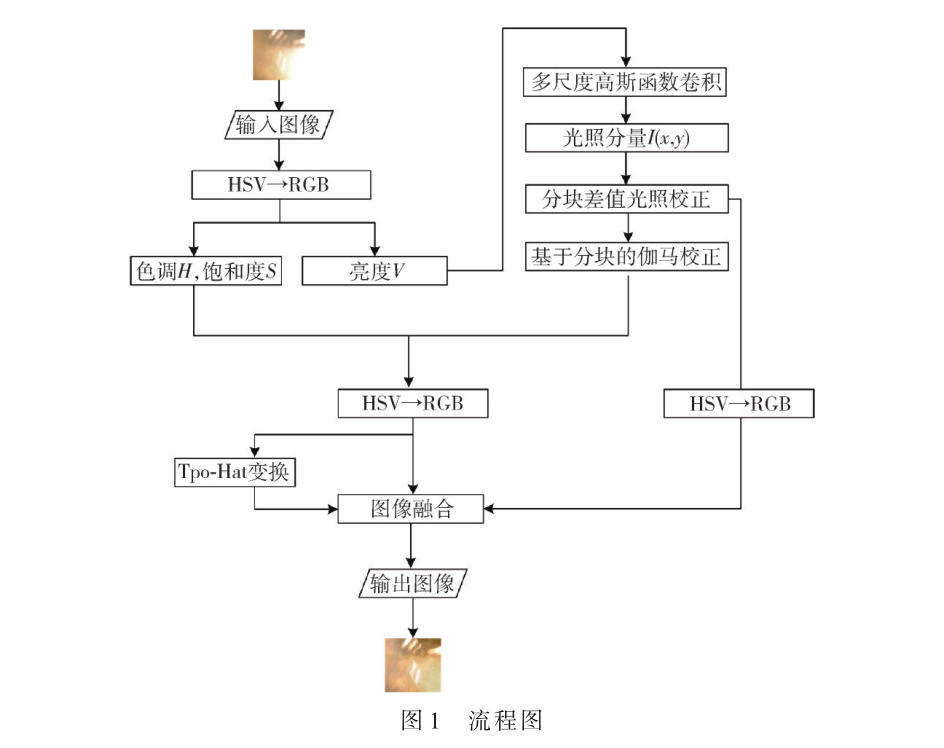
非均匀光照下铜板表面缺陷图像增强[EDA与制造][工业自动化]
發(fā)表于:2024/9/14 下午1:50:20
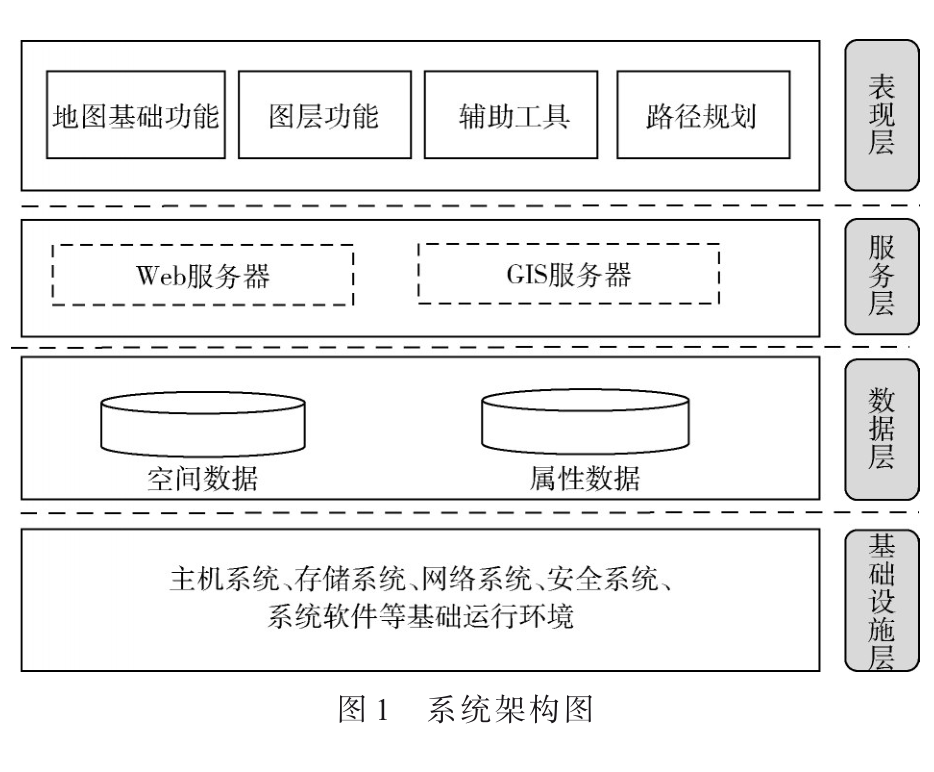
无人机城市三维航迹规划可视化平台设计与实现[模拟设计][航空航天]
發(fā)表于:2024/9/14 下午1:37:20