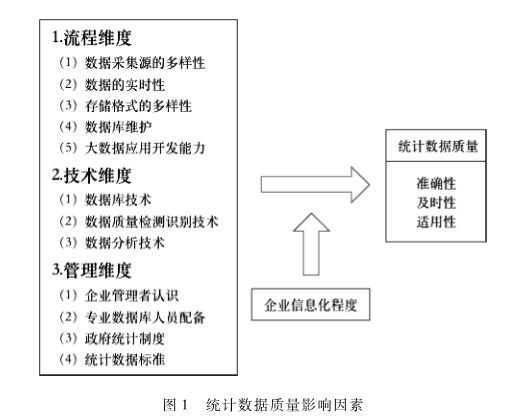
基于Vensim PLE的决策监管类系统的数据质量影响因素分析——以智能化国资国企在线监管平台系统为例[其他][其他]
發(fā)表于:2024/11/27 下午2:38:05
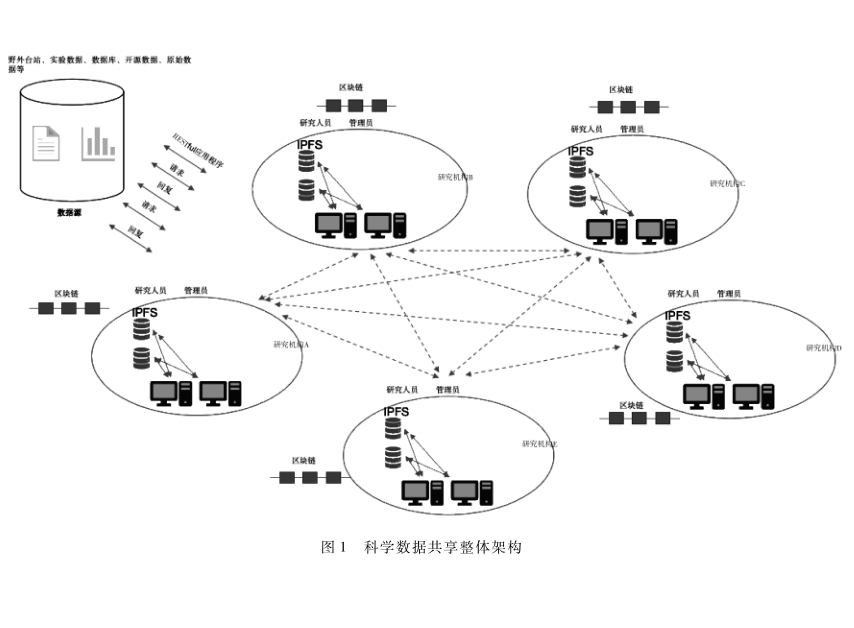
基于主从多链的科学数据共享方法构建与实证研究[通信与网络][信息安全]
發(fā)表于:2024/11/27 下午2:25:00
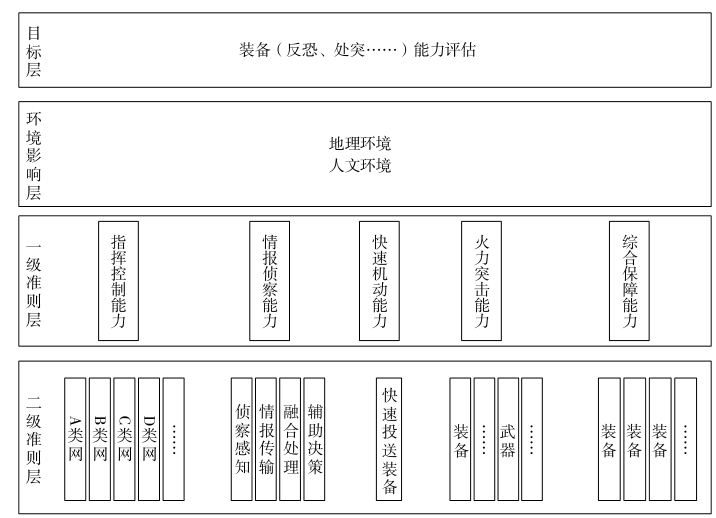
基于层次分析法和模糊评价方法相结合的装备数据评估模型方法研究[其他][其他]
發(fā)表于:2024/11/27 下午2:02:31
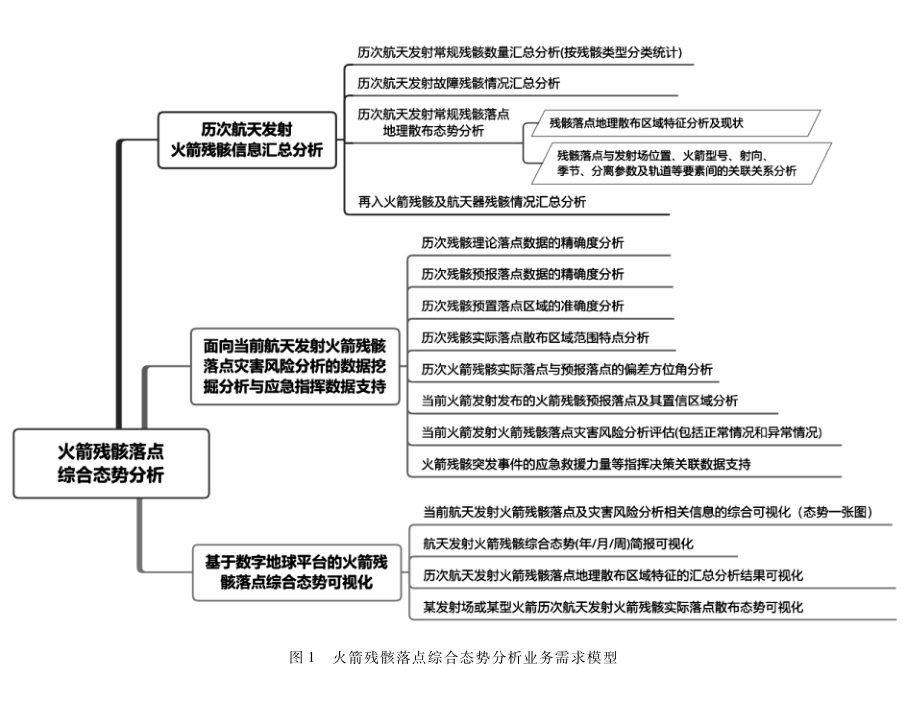
火箭残骸落点综合态势分析方法与应用[其他][航空航天]
發(fā)表于:2024/11/26 下午2:20:51
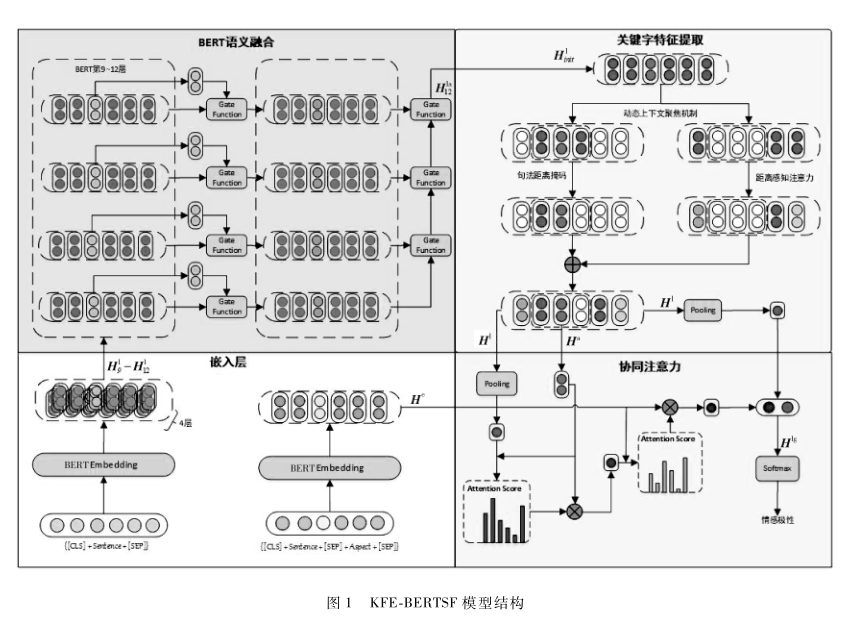
结合BERT语义融合和关键词特征提取的方面级情感分类研究[人工智能][其他]
發(fā)表于:2024/11/26 下午2:04:54
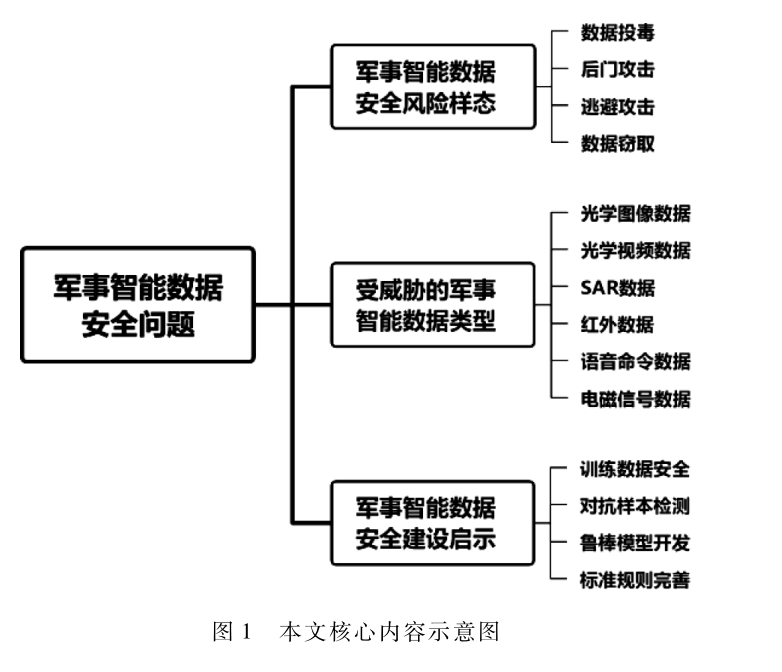
军事智能数据安全问题:对抗攻击威胁[通信与网络][信息安全]
發(fā)表于:2024/11/26 下午1:49:00
国标《数据安全技术 数据分类分级规则》分析与解读[其他][其他]
發(fā)表于:2024/11/26 下午1:33:02
基于多粒度级联森林优化算法的网络入侵检测模型研究[通信与网络][信息安全]
發(fā)表于:2024/11/26 下午1:17:00